Partager la publication "Guide du Développeur, Intégrateur, Testeur de GPS RTK"
![]()
Guide du développeur, intégrateur ou testeur de GPS RTK
Besoin de précision
La précision centimétrique devient indispensable voir vitale dès lors que vous souhaitez guider le déplacement d’un robot, d’un drone leur permettant d’éviter des obstacles ou bien que vous deviez connaitre en détails une trajectoire, une position exacte à un instant précis .
Mais de très nombreuses applications nécessitent un positionnement précis parmi elles :
- Solution de guidage (Robot, véhicules, drones, tracteurs, tondeuses, etc.)
- La géolocalisation d’objets de valeurs (containers, chargement)
- Le chronométrage pour la course ou l’entrainement (voitures, chevaux, etc.)
- L’étude expérimentale d’objets en mouvements (Évaluation de la répétition ou de la déformation)
Les cabinets de R&D sont très sollicités pour les développer très rapidement.
Objectif
Notre objectif ici est de vous apporter les informations de base qui vous permettront à la fois de comprendre rapidement le fonctionnement et le principe des corrections RTK mais aussi de gagner du temps sur les différentes étapes d’intégration de votre projet.

Le réseau Orphéon avec les pionniers
Orphéon propose depuis 15 ans un positionnement de précision centimétrique grâce aux corrections RTK temps réels qui sont le cœur de notre activité et pour laquelle nous avons développé une expertise inégalée. Nous fournissons ce type de corrections à toutes sortes d’applications dites « traditionnelles » : pour la topographie, le cadastre, l’agriculture, le guidage d’engins, la bathymétrie, la cartographie ou le SIG, mais nous fournissons également ces corrections aux applications de demain.
Quels sont les éléments
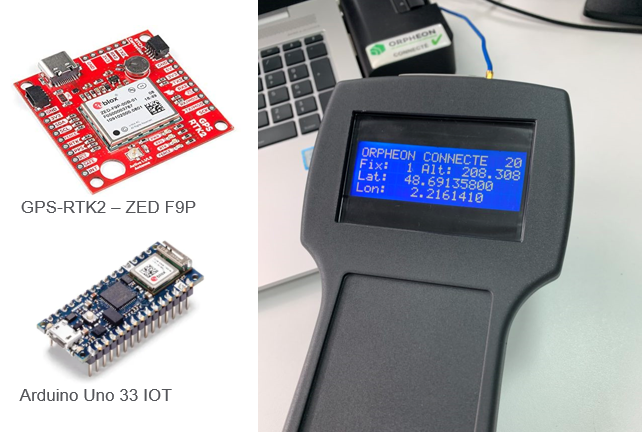
Tout d’abord, vous devez disposer d’un module GPS-RTK. Soit une puce GPS, soit une carte de développement bien plus pratique pour vos premiers tests. L’avantage de la carte de développement est de proposer un module déjà câblé sur un circuit imprimé et qui dispose de toute la connectique bien utile.
Il existe plusieurs types de cartes de développement Ublox, Quectel etc. qui sont capables de travailler en Full GNSS (GPS, Glonass, Galileo et Beidou) mais qui ont aussi la capacité de recevoir des messages RTCM (les corrections fournies par le serveur Orphéon) pour leurs calculs et ainsi améliorer leur positionnement.
Le récepteur GPS doit être connecté à une antenne de réception. Les caractéristiques et la qualité de l’antenne vont bien entendu conditionner la qualité de réception des signaux satellites que le module GPS va pouvoir traiter. A noter que les signaux des différentes constellations de satellites ne sont pas les mêmes, l’antenne devra donc être en mesure de capter chacune de ces fréquences.
Généralement, il est possible de connecter ces cartes via un port USB à votre PC puis de lancer l’application du fabriquant pour accéder au paramétrage mais aussi souvent de se connecter au serveur Orphéon (via la connexion internet et un Client NTRIP intégré à l’application) pour tester la correction et obtenir une précision centimétrique en quelques instants.
Mais ensuite, ce qui est intéressant c’est de rendre ce système un peut plus autonome pour pouvoir en disposer au cœur d’un projet plus complexe. Il suffit alors de connecter cette carte de développement à un contrôleur (Arduino, Rasberry etc.).
Facilité d’intégration
Il est intéressant de voir que l’intégration d’un module GPS est très largement facilité par les codes open source disponibles sur le net et très largement commentés. Les cartes de développement peuvent être pilotées via un port série ou bien I2C.
Nous ne rentrerons donc pas dans le détail de cette programmation.
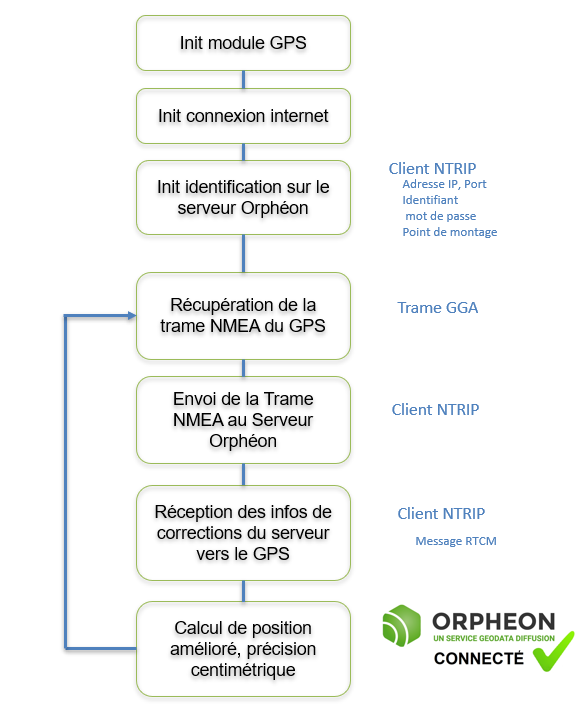
Les étapes
Quel que soit votre matériel, les étapes de connexion ont été normalisées et définies pour permettre à chacun d’accéder à la précision centimérique.
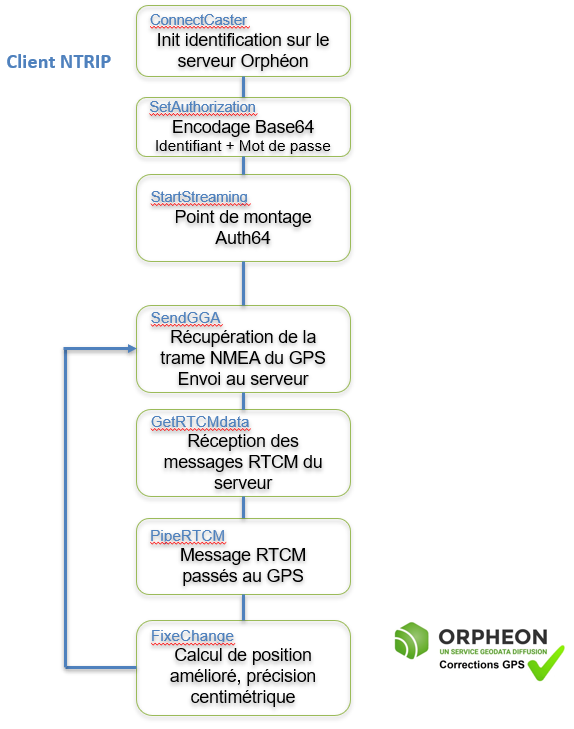
En détails
Au moment de la connexion, le client Ntrip s’identifie sur le serveur et envoi sa position initiale (trame NMEA type GGA).
Il utilise les paramètres de connexion :
- Adresse DNS du serveur
- Port de com du serveur
- Identifiant utilisateur
- Mot de passe
- Point de montage (permet de définir le protocole de com et les messages RTCM envoyés par le serveur)
il est intéressant de comprendre ce qui se passe à chacune de ces étapes.
Le serveur va ensuite envoyer les paramètres de correction toutes les secondes que le module devra « passer » au GPS pour ses calculs de positionnement.
Durant sa phase d’initialisation, le GPS va résoudre les ambiguïtés entières. La durée de cette phase est variable et dépend de l’algorithme, de la distance au pivot, mais aussi du nombre d’observations (nombre de satellites, nombre de fréquences).
Le GPS va ensuite modifier l’indication de son état en fonction de la résolution des ambiguïtés :
RTK Flottant (2) : l’ambiguïté est autorisé à être un nombre à virgule décimale ou flottante. La précision des décimétrique.
RTK Fixe (4) : le nombre de longueurs d’onde est un nombre entier. La précision est centimétrique.
Un faible nombre de satellites visibles, la mauvaise géométrie de la constellation de satellites et une liaison de réception des corrections avec le mobile peuvent empêcher une solution fixe.
Ensuite le module devra envoyer sa position au serveur (au minimum toutes les 20sec) pour permettre au serveur de faire évoluer la solution de correction et de s’assurer que la connexion est toujours « vivante »
Connexion au serveur Orphéon via une appli Client NTRIP
Une fois le module GPS connecté via le port USB à un PC, il existe plusieurs possibilités de se connecter au serveur Orphéon pour recevoir les corrections nécessaires à l’augmentation de précision d’un GPS-RTK.
Tant que le GPS n’est pas connecté et ne reçoit pas les messages de corrections RTCM du serveur Orphéon, le GPS fonctionne comme un GPS ordinaire avec une précision de plusieurs mètres (mode naturel).
Applications
Les applications présentées ici sont données à titre d’exemple car gratuites, fournies par un constructeur ou bien disponibles sur internet en open source.
- RTKLIB
- u-center Ublox
- GNSS Internet Radio
- NTRIPClient Lefebure
Exemples de différentes applications avec Client NTRIP
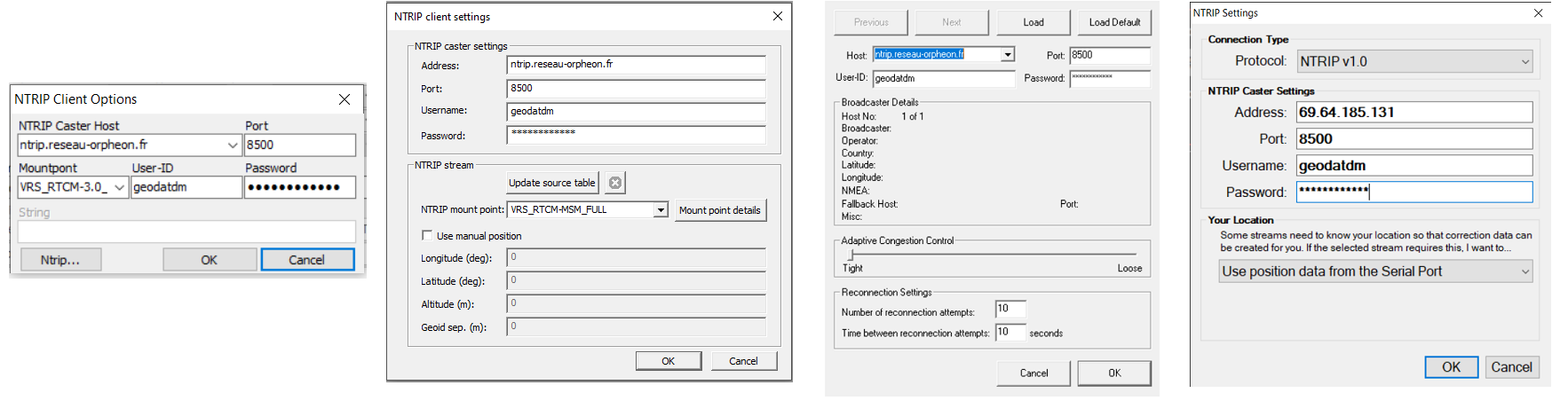
Paramétrage
Chacune de ces applications se paramètre de la même manière, il faut ainsi renseigner* :
- l’adresse du serveur Orphéon : ntrip.reseau-orpheon.fr
- Le port : 8500
- Le point de montage : VRS_RTCM-MSM_FULL
- L’identifiant : geodatdm
- Le mot de passe : *******
* Ces paramètres sont donnés à titre d’exemple, il convient de se référer au bon de livraison envoyé par notre équipe et correspondant spécifiquement à votre abonnement.
La précision
Lorsque ces applications sont lancées, elles respectent une à une les étapes décrites plus haut et en quelques secondes la position obtenue gagne en précision pour arriver à une précision centimétrique :
La précision du positionnement avec Orphéon est centimétrique pour un écart type de 1σ :
- comprise entre 1 et 2 centimètres en planimétrie (Lambert 93).,
- comprise entre 2 et 3 cm en altimétrie (IGN69).
Connexion au serveur Orphéon via votre carte contrôleur
Il est également possible de rendre ce système un peut plus autonome pour en disposer au cœur d’un projet plus complexe. Il suffit alors de connecter votre carte de développement GPS-RTK à un contrôleur (Arduino, Rasberry etc.).
Pour cela, il va falloir programmer ce contrôleur pour qu’il puisse automatiquement exécuter les différentes étapes nécessaires pour se connecter au serveur Orphéon et ainsi bénéficier des corrections de précision.
Cette programmation revient à intégrer le Client NTRIP sur la carte contrôleur. Sur le Net il existe de multiple exemples en open source commentés.
Envoi d’une trame NMEA type GGA
Au moment de la connexion il est important d’envoyer une trame NMEA type GPGGA avec la position du GPS mobile. Cette position va permettre au serveur de définir une cellule de plusieurs stations d’observation du réseau autour de l’utilisateur et ainsi pouvoir fournir les corrections correspondantes à la position.
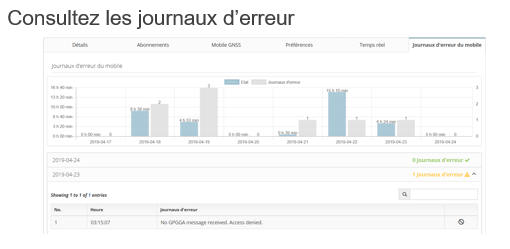
Attention : Si aucune trame n’est envoyée au serveur, le message d’erreur No GPGGA message received. Access denied est ajouté dans le journal des erreurs (voir Espace client).
De même si la position envoyée est nulle (tout à zéro) le message Currently no data available. No sites and/or clusters defined. est ajouté dans le journal des erreurs (voir Espace client).
Zone de couverture
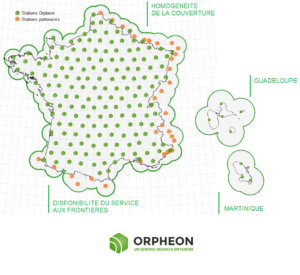
La position du GPS mobile envoyée au serveur doit impérativement se situer dans la zone de couverture du réseau mais également dans la zone de restriction stipulée lors de l’abonnement au service.
En dehors de la zone de couverture du réseau Orpheon, le serveur n’est pas en capacité de fournir les corrections correspondantes. Notre zone de couverture est définie par la position de nos stations permanentes d’observation.
Attention à la restriction géographique de votre abonnement, le serveur mettra fin à la connexion et ajoutera un message d’erreur dans le journal des connexions (voir Espace Client)
Si le GPS mobile retourne une position en dehors de la zone de souscription
- National : aucune restriction
- Régional : la région administrative stipulée lors de l’abonnement (ou 4 départements contigus)
- Départemental : le département administratif stipulé lors de l’abonnement
Maintien de la connexion avec le serveur
Attention : Pour maintenir la connexion active entre le récepteur GPS et le serveur Ntrip qui envoi les corrections, une trame GGA (si possible mise à jour avec la position réelle du GPS) doit être renvoyée régulièrement au serveur. Cette mesure permet de s’assurer que la liaison est vraiment active. Si au bout de 30 secondes aucune trame GGA n’est envoyée au serveur, celui-ci considère que la liaison est interrompue et met fin à la connexion.
Dans le journal des erreurs (voir Espace client) un nouveau message d’information indique : Rover user rejected. No heartbeat received.
Les étapes
Sans entrer dans le détail de ces programmes, il est intéressant de comprendre ce qui se passe à chacune de ces étapes.
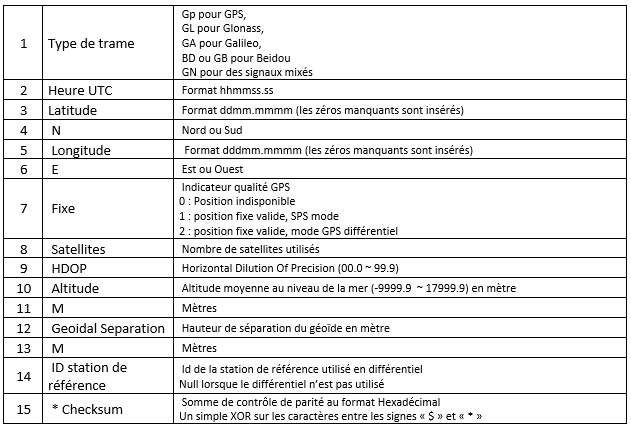
Contenu de la trame NMEA GGA
Il existe un grand nombre de trame NMEA différentes (plus d’une trentaine). Ces trames sont définies par la norme NMEA 0183 qui est une spécification pour la communication entre équipements marins, dont les GPS.
Cette norme utilise des trames ou phrases pour transmettre les informations, chaque information est séparée par une virgule.
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| $GNGGA, | 073939.00, | 4841.47953, | N | 00212.97078, | E, | 1, | 24, | 0.62, | 165.7, | M, | 46.2, | M | , , | *42 |
La trame commence par le signe »$ » puis le type d’épiquement est défini par les deux caractères qui suivent.
Chaque trame a sa propre syntaxe, mais selon les cas elles doivent se terminer, après le signe « * » par des bits de controle qui permettent de vérifier que la tram n’a pas été endommagée avant sa réception.
Le serveur NTRIP a besoin des informations contenu dans la trame GGA car cette trame fourni la position courante du récepteur GPS.
Les trames NMEA font toutes référence à l’ellipsoïde WGS84 comme base de système de coordonnées.
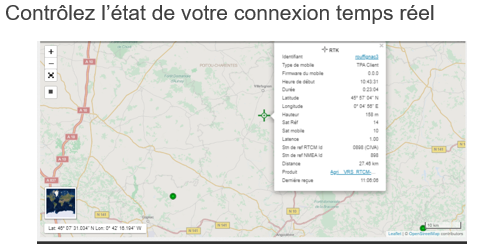
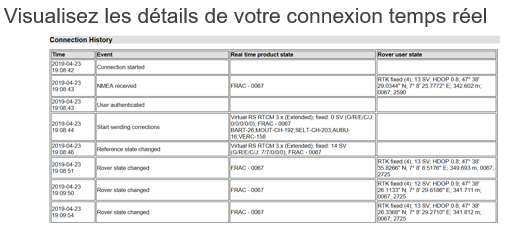
Les informations de l’espace client

Le réseau Orphéon propose grâce à son interface utilisateurs, des outils qui facilitent votre travail quotidien ou bien la mise au point et l’intégration de puces GPS de précision dans vos projets. Vérifiez en temps réel vos connexions, consultez des journaux de logs ou visualiser vos trajectoires facilite votre travail et permet de gagner du temps. mais aussi Post-traitez directement en ligne vos travaux.
Vos outils
- Visualisation de vos connexions temps réel
- Contrôlez votre connexion et les paramètres
- Analysez vos connexions (journal de log)
- Visualisez vos trajectoires
- Effectuer du Post traitement en ligne
- Changement de système de référence en ligne
- Téléchargez des Rinex des stations Orphéon

Voir aussi