Partager la publication "Le positionnement satellites GPS / GNSS"
Le GNSS
Le GNSS veut dire Géolocalisation et Navigation par un Système de Satellites. Ce terme regroupe l’ensemble des matériels et des installations permettant le positionnement par satellites.
Il s’agit d’un ensemble de composants reposant sur une ou plusieurs constellations de satellites artificiels permettant de fournir à un utilisateur par l’intermédiaire d’un récepteur portable de petite taille sa position 3D, sa vitesse 3D et l’heure.
Généralement par abus de langage, nous utilisions le terme générique GPS pour Global Positionning System pour décrire les différents équipements de géo positionnement. Toutefois, ce terme est en réalité le nom d’un ensemble de 24 satellites américains placés en orbite à 20 00 km d’altitude.
Cette constellation de satellites qui était la première dans l’histoire a donc laissé son nom à la technologie de géo positionnement.
Besoin d’affiner la position
Un GPS standard donne une position naturelle approximative avec une précision de quelques mètres. Cette précision qui est suffisante pour beaucoup d’applications grand publique, peut être corrigée pour obtenir une bien meilleure précision et rendre cette technologie utilisable par les professionnels pour leurs travaux de précision.
La réception des signaux envoyés par les différents satellites vont lui permettre de calculer sa position. En mode naturel (sans correction) ce calcul permet d’obtenir une précision de l’ordre de plus ou moins 3 m. Pour obtenir le calcul d’une position correcte en 3D, le récepteur doit capter les signaux d’au moins 5 satellites.
Des corrections pour gagner en précision
Pour que sa précision soit augmentée et utilisable dans les travaux agricoles, la topographie, le guidage d’engins ou dans bien d’autres domaines d’application (voir) Il nécessite des corrections.
Les GPS vont devoir intégrer des données supplémentaires dans leurs calculs de positionnement afin de corriger les différentes erreurs liées à cette technologie.
Les données de corrections sont obtenus à partir de GPS fixes (station de référence) placés sur des positions dont les coordonnées sont parfaitement connues. Il est ainsi possible de quantifier les différentes erreurs et de les corriger pour pouvoir ensuite les partager avec d’autre GPS se situant dans les même conditions (à proximité).
Fournir des corrections GNSS
Le réseau Orphéon est composé de près de 220 stations d’observations, réparties sur tout le territoire en France métropolitaine et aux Antilles.
L’ensemble de nos stations forment un grand réseau RTK équilibré et homogène qui nous permet de délivrer à nos nombreux clients les corrections GNSS centimétriques pour l’augmentation de la précision de leur GPS de précision. Nos différents services sont commercialisés sous forme d’abonnements ou de forfaits horaires.
Les GPS de précision
Tous les récepteurs GNSS n’ont pas la possibilité d’intégrer des corrections afin d’améliorer leur positionnement ce qui est le cas par exemple de récepteurs grand public intégrés dans la majorité des téléphones portables, les tablettes, les montres ou les véhicules.
Les récepteurs GNSS de précision capables d’accepter les corrections vont intégrer des composants ainsi que des modules logiciels supplémentaires dédiés au calculs de précision.
Nous distinguons deux types de récepteurs GNSS :
- Les récepteurs grand public (Montres, téléphones, tablettes, voitures etc…) qui vont travailler uniquement en mode naturel sans possibilité d’améliorer leur précision grâce à des corrections
- Les récepteurs de précision (RTK), qui vont être capables d’intégrer des données externes de corrections leur permettant d’augmenter leur précision.
Les récepteurs de précisions ont été historiquement développés pour des applications professionnelles. De grands constructeurs ont alors proposés des solutions métiers de plus en plus intégrées adaptées à chaque utilisations où la précision du récepteurs et l’interface utilisateur sont optimisés pour sans cesse améliorer la productivité.
Mais aujourd’hui, l’intégration de puces GNSS de précision se démocratise en devenant abordable et permet d’imaginer aisément toutes sortes d’utilisations pratiques. Il devient alors possible d’intégrer un récepteur RTK de précision centimétrique dans un design compact, léger et peu gourmand en énergie pour répondre aux impératifs de ces nouvelles applications et libérant ainsi l’imagination et la créativité.
Performances du GPS
Tous les GPS du marché n’ont pas les mêmes performances.
Avant toutes choses, les coordonnées géographiques fournies par un GPS sont le résultat de calculs statistiques complexes. Plus il y a de satellites observés, plus il y a de signaux à traiter et plus la puissance de calcul devient importante, mais pas seulement.
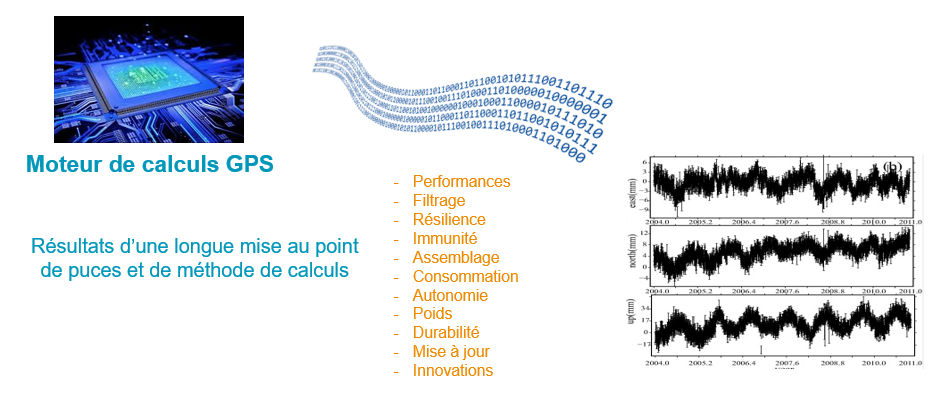
En effet pour effectuer ces calculs complexes, rien n’est laissé au hasard. Les grands constructeurs font des choix de composants sans compromis pour la CPU, la mémoire, la fréquence, l’assemblage constituant le moteur. Tout cela faisant l’objet d’investissements, de recherche et de dépôts de nombreux brevets, mais pas seulement.
Les GPS vont devoir travailler dans des conditions variables de température, d’humidité et dans des environnements plus ou moins parasités. Pour pouvoir résister à ces conditions, les grands constructeurs développent des méthodes et des filtres de calculs toujours plus performants faisant également l’objet de nombreux brevets.
Pour résumer, la différence entre 2 GPS se joue déjà sur la réputation du fabriquant ainsi que la description de la fiche technique mais aussi sur un ensemble d’éléments concrets qui feront vraiment une grande différence au quotidien sur le terrain.
Accéder aux corrections
Pour accéder aux corrections le GPS de précision doit disposer d’un accès internet. Après s’être identifié sur le serveur et avoir donné sa position initiale, le GPS va recevoir un flux de données chaque seconde contenant les paramètres de correction à intégrer dans son calcul de positionnement. En quelques instants, le récepteur GNSS va très rapidement converger vers une précision centimétrique.
Depuis plus de 15 ans, le réseau Orphéon propose des services de corrections GPS d’augmentation de précision N-RTK Full GNSS temps réel permettant aux utilisateurs, en utilisant un seul capteur GNSS de se positionner avec une précision centimétrique dans la référence nationale partout en France et aux Antilles.
Le principe de corrections d’un GPS :
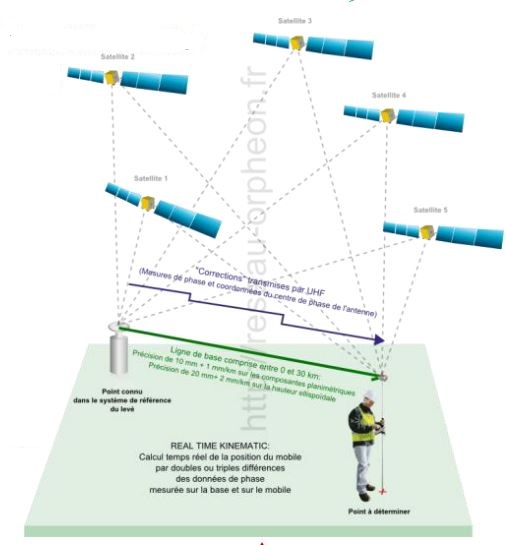
Le RTK
Le RTK (Real Time Kinematic) est un dispositif permettant de transmettre en temps réel les données de corrections d’une base d’observation aux GPS mobiles.
Le mobile va alors intégrer ces informations dans son calcul de positionnement pour gagner en précision.
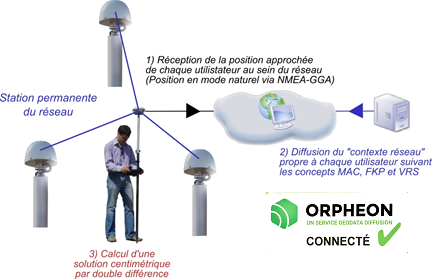
Le NRTK (Network Real Time Kinematic) vient de l’utilisation de plusieurs bases d’observations pour optimiser et de modéliser les informations de corrections sur la zone couverte.
Les données de ce réseau de stations d’observations sont rassemblées en temps réel sur un serveur centralisé. Les mobiles se connectent au serveur via internet mobile pour obtenir leurs informations de corrections.
Les stations d’observations
Orphéon est le premier réseau Français multi-constellations de France.
Avec ses 220 stations en France continentale, toutes Full GNSS soit : GPS, GLONASS , Galiléo et BeiDou avec une présence historique dans les Antilles Françaises.
Le système de corrections de positionnement par satellites Orphéon est basé sur un réseau de stations de références d’observations (OSR : Observation Space Representation ) réparties sur le territoire dont chaque position est connue avec précision.
Toutes les observations de ce réseau sont concentrées sur un centre de calculs pour délivrer à chaque utilisateurs des corrections lui permettant d’obtenir un positionnement beaucoup plus précis.
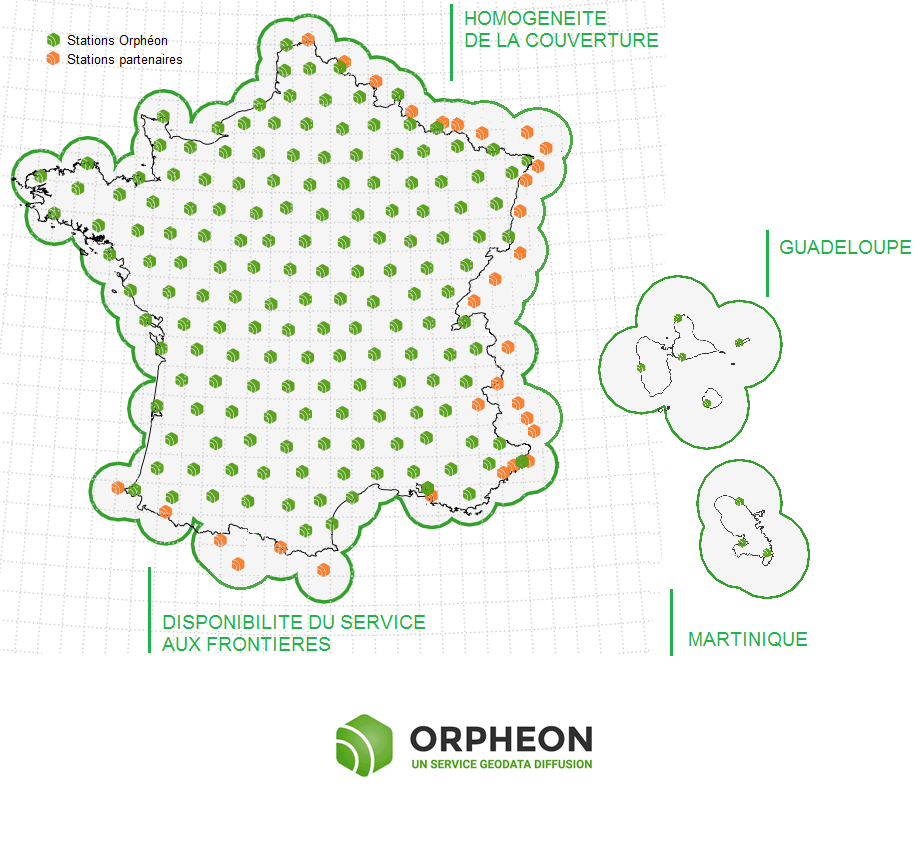
Cliquer sur la carte pour accéder à la carte interactive du réseau
Les services OSR offrent une précision de positionnement au centimètre près, au sein du réseau ou bien à moins de 30 km de la station de référence la plus proche (en mode mono station).
Limites de précision du positionnement GNSS
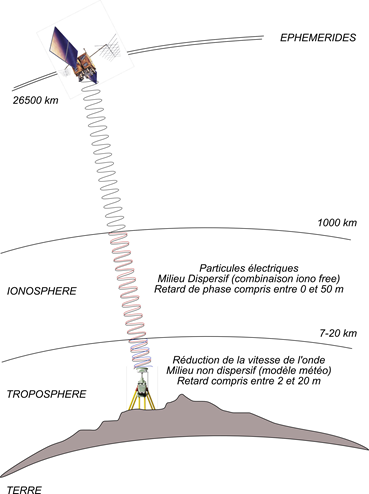
La grande distance parcourue par le signal entre les satellites et les récepteurs entraîne un certain nombre de phénomènes qui influencent la précision du positionnement par GPS.
Les conditions de réceptions au niveau du récepteurs engendre également d’autres phénomènes. C’est donc la conjonction des tous ces facteurs qui contribue à dégrader la précision.
Parmi toutes ces sources d’erreurs, la réfraction atmosphérique, responsable de l’allongement ionosphérique et troposphérique, ainsi que les erreurs d’orbites sont les plus problématiques, dans la mesure où :
- elles ne peuvent pas être préalablement finement modélisées, (contrairement aux biais d’électroniques ou aux variations de centre de phase des antennes),
- elles ne peuvent pas complètement s’annuler par différentiations multiples.
Les sources d’erreurs
Plusieurs erreurs naturelles affectent la mesure de distance satellite / récepteur :
- Le biais d’électronique du satellite.
- L’effet de l’erreur d’horloge du satellite.
- L’erreur de position du centre de phase de l’antenne du satellite.
- L’effet de l’erreur d’orbite des satellites.
- L’allongement ionosphérique (réfraction).
- L’allongement troposphérique (réfraction).
- Les éventuels multi-trajets.
- L’erreur de position du centre de phase de l’antenne du récepteur mobile.
- L’effet de l’erreur d’horloge du récepteur.
- Le biais d’électronique du récepteur.
La précision des orbites des satellites GPS
L’ensemble des satellites utilisés pour le positionnement se déplacent en permanence autour terre. Les paramètres de position sont actualisés chaque semaine dans les almanachs qui sont diffusées par les satellites et permettent à chaque récepteur GPS de déterminer les trajectoires et les marches d’horloge des satellites qu’il utilise. Bien que leur position soit prévue à l’avance leur position réelle est légèrement différente et cette erreur va aussi naturellement se répercuter directement sur la position affichée par le récepteur.
La réfraction dans l’ionosphère
Le signal des satellites rencontre une première zone qui entoure la terre à près de 20 km d’altitude : L’ionosphère. Le signal GPS doit pénétrer cette couche sur son trajet qui entraine une perturbation de la vitesse de l’onde électromagnétique qui se propage. Le temps de trajet mis par l’onde GPS est ainsi modifié d’une durée inconnue, nommée délai ionosphérique. L’influence de l’ionosphère varie en permanence à cause par exemple de l’activité solaire.
Cette réfraction n’est pas constante et subit les conséquences de l’activité solaire quotidienne. Il est donc intéressant de comprendre et de suivre cette activité et son influence sur le fonctionnement de nos instruments. (Plus d’informations sur ces perturbations …)
Comme vous pouvez le voir sur le site web du SpaceWeatherLive.com, ce phénomène est global avec un indice ionosphérique K (quantification des perturbations géomagnétiques) . Celui-ci est une moyenne des indices K relatifs à 13 stations situées entre 44 et 60◦ de latitude ; il s’agit donc d’un indice global.
L’indice K est un indice local qui caractérise la variation du champ magnétique à la station considérée par rapport à une journée calme de référence ; ces mesures sont réalisées à l’aide de magnétomètres.
L’échelle de l’indice Kp comporte 10 échelons :
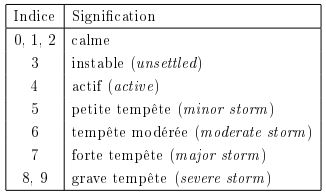
Les échelons de l’Indice Kp
La réfraction dans la troposphère
Le signal des satellites rencontre une deuxième zone qui est la couche basse de l’atmosphère : la troposphère (de 0 à 10 km d’altitude). Le temps de propagation de l’onde GPS est alors affecté par la teneur en vapeur d’eau de cette couche. En pratique les conditions météorologiques et les épaisseurs troposphériques différent suivant l’endroit où l’on se trouve. Nous constatons que la troposphère à une influence plus particulière sur la composante verticale de la position, les erreurs horizontales se compensant plus ou moins du fait que les satellites couvrent à peu près toutes les directions l’horizon.
Les multi trajets
Au niveau des conditions de réceptions des signaux, il existe des phénomènes qui vont encore allonger légèrement le trajet du signal GPS par réflexion ou rebonds de ce signal sur des objets. La position ainsi obtenue peut être ainsi décalée mais elle est surtout très instable car comme les satellites se déplacent, l’angle d’incidence sur le réflecteur change, et la position se déplace d’autant. La qualité de l’antenne de réception est ici déterminante, certaine dispose d’un blindage visant à atténuer ces réflexions parasites.
Évaluation de ces erreurs
Le tableau suivant (Gerhard WUBBENA, 2008), précise la résultante de ces erreurs qui vont ensuite se cumuler :
| Source d’erreur | Influence absolue |
| Orbites | Entre 2 et 50 mètres |
| Ionosphère | Entre 50cm et plus de 100 mètres |
| Troposphère | Entre 1 et 50 cm |
Différentes constellations de satellites
Jusqu’à aujourd’hui, nous utilisions le terme générique GPS pour Global Positioning System pour décrire les différents équipements de géo positionnement.
Toutefois, ce terme est en réalité le nom d’un ensemble de 24 satellites américains placés en orbite à 20 00 km d’altitude. Cette constellation de satellites qui était la première dans l’histoire a donc laissé son nom à la technologie de géo positionnement.
GPS + Glonass + Galiléo + Beidou
Ces satellites tournent autours de la terre et sont donc en déplacement constant. Pour établir une position, un minimum de 5 satellites est nécessaire.
D’autres constellations de satellites ont ainsi été mises en service par d’autres pays :
- GPS pour les satellites américains
- Glonass pour la Russie,
- Galileo pour l’Europe a également été mis en service, toutes sont disponibles en France.
- Beidou pour la Chine et plus récemment
L’ensemble de ces constellations est regroupé sous la seule appellation de GNSS pour Global Navigation Satellite System.
Satellites GPS Actifs en 2019
- GPS : En août 2019 , 74 satellites de navigation du système de positionnement global (Global Positioning System) avaient été lancés, dont 31 étaient opérationnels, 9 en réserve, 2 en cours de test, 30 avaient été retirés et 2 avaient été perdus au moment du lancement. La constellation nécessite au moins 24 satellites opérationnels et le nombre de cibles officielles est de 33.
- Galileo : compte 30 satellites (24 opérationnels et 6 en reserve). Galileo a commencé à offrir un service opérationnel précoce le 15 Décembre 2016, pour atteindre sa pleine capacité opérationnelle en 2019.
- Glonass : En mai 2019 , 38 satellites de navigation GLONASS avaient été lancés, dont 26 avaient atteint l’orbite correcte et 24 étaient actuellement opérationnels.
- Beidou : BeiDou-3 système BeiDou de troisième génération comprendra à terme 35 satellites et devrait fournir des services mondiaux une fois achevé en 2020.
Compatibilité matériel
Le récepteur doit avant tout être capable de recevoir et de traiter des corrections en étant client-RTK (ce qui n’est pour le moment pas le cas de la majorité des smartphones). Différents fabricants, représentés par nos distributeurs, proposent une large gamme de récepteurs adaptés aux différentes applications les plus courantes (voir Domaines d’application). Mais il est également possible de trouver de nombreuses cartes électroniques ou composants à intégrer pour le développement de solutions dédiées ou pour l’études et la conception de nouvelles applications.
Les récepteurs GNSS ne sont pas tous compatibles avec la totalités des constellations de satellites aujourd’hui disponibles. Ainsi la compatibilité ou la capacité d’un récepteur à traiter les signaux provenant de ces différentes constellations de satellites permet d’augmenter la possibilité de travail dans des zones difficiles ou les masques sont nombreux car il faut malgré tout toujours un minimum de 4 satellites pour établir une position.
Les avantages du GNSS
En offrant la possibilité de mixer les signaux des différentes constellations de satellites, les récepteurs GNSS permettent de calculer une position plus stable mais aussi de travailler dans des endroits plus restreints.
![]()
En effet, les bâtiments les arbres, les constructions etc créent des masques qui empêchent les récepteurs de recevoir correctement les signaux des satellites. Plus un récepteurs est en capacité de traiter de signaux différents et moins ces masques vous empêcheront de travailler : d’où un confort de travail et une productivité accrus.
Les Serveurs
Relier les station GNSS permanente en réseau à un centre de calcul
Pour plus de précision, ces signaux d’observation des antennes permanentes sont regroupés sur un serveurs qui va permettre un meilleur traitement des signaux et une meilleure détermination et modélisation des sources d’erreurs en utilisant :
- Des orbites ultra rapides prédites avec une imprécision de 5 cm correspondant à 3 ns en lieu et place des orbites radiodiffusées qui ont une plus grande imprécision de 100 cm ou 5 ns.
- Des modèles météo complémentaires notamment troposphériques
- Des modèles géophysiques (marée et surcharge océanique induite, marée solide, marée polaire, surcharge atmosphérique etc .)
Traitement des signaux
Concernant la correction de position intégrant l’ensemble de ces signaux, il est nécessaire que le matériel de terrain, mais aussi les bases de stations permanentes du réseau, soient elles-mêmes compatibles avec l’ensemble de ces différents satellites pour pouvoir délivrer une correction complète correspondante aux différents utilisateurs sur le terrain.
Les corrections étant diffusées en temps réel, il est indispensable de disposer de meilleurs infrastructures pour garantir l’ensemble des flux de données :
- Les flux provenant de nos stations pour alimenter les serveurs
- Les flux entrants et sortants des positions et des corrections de chaque utilisateur
il faut que le mobile de l’utilisateur reçoive à chaque époque de mesure (typiquement toutes les secondes) les « corrections » correspondant à sa zone de travail, même lorsqu’il se déplace.
Ces corrections parviennent à chaque utilisateur en continu par GPRS avec un délai moyen d’acheminement de 750 ms, l’écart type, c’est-à-dire l’écart à la moyenne pour 68% des corrections envoyées, étant également de cet ordre de grandeur.
De manière à ce que le système reste cohérent, il reste donc moins de 250 ms pour :
- Recevoir les observations des stations permanentes sur le centre de calcul
- Les mettre en cohérence temporelle
- Calculer les « corrections »
- Envoyer les « corrections » à l’utilisateur
Les avantages du réseau Orphéon
- Compatibles avec les récepteurs GNSS RTK de toutes marques
- Précision centimétrique
- Mise en service très rapide et simple partout
- Couverture dense, régulière et structurée de tout le territoire
- Une qualité et un service de haut niveau
- Full GNSS : Productivité accrue (corrections Galileo disponibles depuis le 12/10/2017)
- Tout ce que vous avez à faire est de connecter votre récepteur GNSS au service temps réel de corrections et d’augmentation de précision.
- Vous recevez très rapidement vos données de positionnement, directement dans le référentiel national.
- Une surveillance du réseau 24h/24 365 jours grâce à une équipe internationale
- Un support technique et une assistance expérimentée
- Vous pouvez consulter l’état du réseau (via notre application smartphone)
- Nos offres sont modulaires : Abonnements ou Forfaits
- Un investissement maîtrisé
Réduisez vos investissements grâce à Orphéon
Un seul récepteur GNSS mobile suffit : votre investissement initial se retrouve réduit significativement, et vous maîtrisez finement votre budget en fonction de votre activité.
Les services Orphéon ont pour but de vous simplifier l’accès aux corrections :
- Pas d’investissement initial important dans une ou plusieurs stations de base
- Pas de surveillance d’installation (station de référence, d’accès internet, d’alimentation)
- Pas de maintenance / remplacement de matériel à assurer
- Pas de crainte de panne ni d’arrêt de la station de référence , lorsqu’une station s’arrête, notre maillage compense et vous continuez à travailler avec la même précision.
- Pas de notion de distance avec la station de référence pour une précision centimétrique constante, le réseau Orphéon calcul les corrections optimales à partir d’une cellule de plusieurs stations
- Pas de personnel à former ou de sous-traitant à faire intervenir pour gérer la station de référence.
- Pas d’astreinte à organiser pour des applications ou des sites sensibles
Nous nous chargeons de tout cela pour vous et vous pouvez vous concentrer sur votre mission première : votre métier.
Le Full GNSS pour quoi faire ?
Pour rappel, afin de pouvoir se positionner à quelques centimètres près, un mobile GPS/GNSS doit pouvoir :
- effectuer des mesures de phase non bruitées sur au moins 5 satellites bien répartis dans l’espace,
- et recevoir des corrections différentielles sur ces mêmes 5 satellites.
- une qualité de positionnement accrue
- gain de productivité
Ajouter les constellations de satellites Glonass, Galiléo et BeiDou à ceux de la constellation GPS permet ainsi d’augmenter la possibilité de recevoir un nombre de signaux suffisant et de meilleure qualité.
Pour aller plus loin techniquement
Les récepteurs GNSS de précision capables d’accepter les corrections vont intégrer des composants ainsi que des modules logiciels supplémentaires dédiés au calculs de précision.
Principe de la correction :
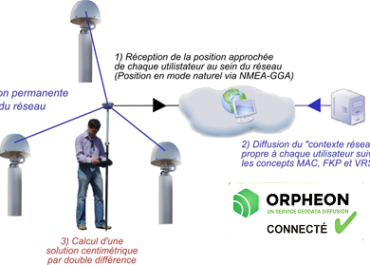
En plaçant une Station GPS de Référence fixe (ou station de base) dont on connait la position exacte et précise en longitude, latitude et altitude, nous pouvons calculer l’erreur de positionnement que nous renvoie un GPS à chaque instant.Il devient alors facile de calculer la correction qui nous donne sa position exacte au centimètre près (et parfois mieux).A l’usage, nous avons constaté qu’il était possible d’appliquer cette même correction à d’autres GPS qui se trouvent à proximité (quelques Km – a titre indicatif, on estime l’erreur à environ 1 mm/km d’éloignement). Le GPS positionné de façon fixe est appelé station de référence ou pivot.Pour distribuer cette correction aux GPS (au format RTCM standard) qui se trouvent à proximité, il faut pouvoir communiquer avec eux, soit par radio soit par internet via la téléphonie mobile (modem).Il est alors important de noter que le mobile (ou rover) envoie sa position au centre de calcul du réseau (trame NMEA-GGA) puis calculera à partir des informations de corrections reçues en retour, sa solution de positionnement par doubles différences, afin d’éliminer les erreurs non corrélées dans l’espace, telles que l’erreur d’horloge des satellites ou leurs biais d’électronique.Depuis plus de 15 ans Géodata Diffusion a installé un réseau de 215 stations de référence pour couvrir la totalité de la France. L’ensemble des observations de chacune de ces stations sont rassemblées sur nos serveurs nous permettant ensuite de les fournir à nos clients via un abonnement à nos corrections pour le positionnement par satellites .Le mono Station :
En connectant un GPS mobile à une station de référence (ou pivot) par radio ou téléphonie mobile, il est possible de calculer et de profiter des corrections donc de la précision centimétrique amenée par la station de référence au GPS mobile.La distance qui sépare le GPS mobile de la Station de Référence devient la ligne de base et la précision de la correction devient alors dépendante de sa longueur. Plus on s’éloigne de la station de base, plus la précision se dégrade. On observe que dans un rayon de 30km la précision centimétrique est conservée.Ce mode permet une mise en route très rapide (temps d’initialisation réduit) et un investissement modéré mais reste fragile en cas d’arrêt de la station de base et le besoin de sécuriser ce matériel.Le mode réseau :
Le mode réseau est un mode avancé de calculs des corrections pour le positionnement par satellites qui met en oeuvre plusieurs stations de références qui entourent un récepteur mobile, créant ainsi une cellule. En combinant les corrections individuelles de chacune des Stations de référence de la cellule, il est alors possible d’obtenir une correction centimétrique plus homogène et plus stable qu’avec le mono station.
Ce mode, qui ne dépend donc pas d’une seule station d’observation, présente beaucoup d’intérêts car il offre alors une correction qui ne dépend plus de la longueur de la ligne de base. La qualité des corrections est homogène partout au sein de la cellule.
Le réseau offre également un avantage indéniable car ne dépendant pas d’une seule station de base pour générer des corrections de qualité mais d’une cellule en cas d’arrêt d’une des stations, le réseau continue de fonctionner correctement et à délivrer des corrections de qualité et de précision centimétriques car il compense l’absence d’une des bases.
Le réseau permet une mise en route très rapide et un temps d’initialisation très réduit. Bien sur le mode réseau représente un investissement important car il nécessite une infrastructure importante et une grande expertise qui ne s’improvise pas.
La répétabilité :
Dans certaines applications, il est essentiel de pouvoir revenir avec exactitude se repositionner au même endroit et parfois après plusieurs années. Cette répétabilité est obtenue grâce à la précision centimétrique des corrections délivrées d’une part, mais aussi par le positionnement précis et fixe des stations de référence. La stabilité et le contrôle de leur positionnement est l’une des clés.
Techniquement
Le fonctionnement des GNSS repose sur la mesure du temps de propagation du signal émis par un satellite jusqu’à sa mesure par un récepteur. La mesure du temps de propagation du signal en provenance de plusieurs satellites permet par intersection de déterminer la position du récepteur.
Les satellites émettent donc en direction de la Terre des ondes électromagnétiques qui se propagent à la vitesse de la lumière.
Le récepteur sur Terre mesure le temps mis par l’onde pour arriver jusqu’à lui. Le récepteur peut alors estimer la distance le séparant du satellite à partir de la durée de propagation de l’onde (environ 70 ms). La mesure précise de ce temps de propagation est primordiale puisqu’une erreur de 10 µs engendre une erreur de 300 m : il faut donc une précision de 1 ns pour atteindre une résolution de l’ordre du mètre.
La mesure précise de ce temps de propagation nécessite une synchronisation parfaite des satellites entre eux et avec le récepteur [Hofmann-Wellenhof et al., 2008 HOFMANN-WELLENHOF, B., LICHTENEGGER, H. et WASLE, E. (2008).Ó]. Cette désynchronisation intervenant de la même manière dans toutes les mesures faites en direction des satellites à une époque donnée, il suffit donc d’estimer un paramètre de désynchronisation (appelé erreur d’horloge) pour lever cette incertitude.
Pour un positionnement standard par GNSS, 4 inconnues doivent donc être déterminées :
- Trois inconnues de position, dans un repère géocentrique, lié à un système de référence propre au GNSS ;
- Une inconnue de temps, liée à la désynchronisation du récepteur avec le temps GNSS.
Méthodes de positionnement
les différentes méthodes de positionnement :
- Standard : Positionnement absolu sur le code en temps réel ou différé ; la précision est de l’ordre de 5 m.
- DGNSS : Differential GNSS, positionnement relatif sur la mesure de code en temps réel ou différé ; la précision est de l’ordre de 50 cm.
- RTK : Real Time Kinematic, positionnement relatif sur la mesure de phase en temps réel ; la précision est de l’ordre de 4 cm.
- Statique : Positionnement relatif sur la phase en temps réel ou différé ; la précision varie entre quelques millimètres et quelques centimètres en fonction du temps d’occupation.
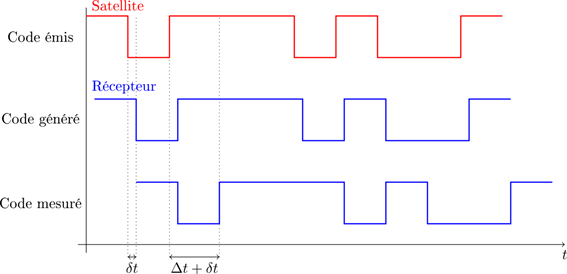
La mesure de code
Le récepteur reçoit en continu le code provenant du satellite avec un retard venant du temps mis par l’onde pour parcourir la distance entre le satellite et le récepteur. Le récepteur mesure donc ce retard ou décalage , égal à la différence entre l’instant de réception (horloge récepteur) et l’instant d’émission (horloge émetteur). Les horloges récepteur et émetteur (satellite) n’étant pas synchronisés, l’écart de temps est entaché d’une erreur qu’il est nécessaire d’estimer.
Mesure de Code
4 inconnues doivent donc être déterminées : pour un positionnement instantané, la mesure de 4 pseudo-distances au minimum est donc nécessaire.
Les récepteurs utilisés actuellement permettent de réaliser la mesure de code avec une précision de l’ordre du centième de cycle (longueur d’un bit).
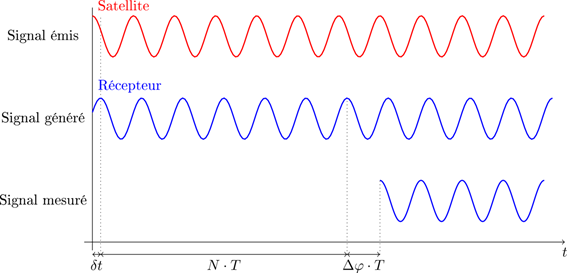
La mesure de phase
Une autre technique que la mesure de code utilisable pour le positionnement par GNSS repose sur la mesure du déphasage entre les signaux reçus et générés par le récepteur. Cette mesure peut se faire sur les différentes porteuses utilisées par le GNSS. Bien sûr, les horloges récepteur et émetteur (satellite) n’étant pas synchronisées, le déphasage mesuré est entaché d’une erreur de synchronisation qu’il est toujours nécessaire d’estimer.
Mesure de Phase
Le signal émis par le satellite est reçu à par le récepteur. un nombre entier de cycles, la période du signal, la partie fractionnaire de cycle mesurée.
Cependant, seule la partie fractionnaire de la durée de propagation du signal entre le satellite et le récepteur comptée en nombre de cycles peut être mesurée par les récepteurs : le nombre entier de cycles écoulés depuis le début de la mesure est inconnu : on parle d’ambiguïté de la mesure de phase. On définit alors l’ambiguïté entière comme étant le nombre entier de cycles écoulés au début de la mesure.
Pendant une session d’observation, on veille donc de ce fait à ne pas interrompre le signal observé en direction d’un satellite. En cas d’interruption, on parle de saut de cycle : la valeur de l’ambiguïté entière change.
Remarque : Pour GPS les longueurs d’onde associées aux porteuses L1 et L2 sont respectivement A1 = 19,0 cm et A2 = 24.4 cm . La précision sur la mesure de phase est donc sub-millimétrique.
Message de navigation
En plus d’être modulé par la phase à l’aide du code, les signaux GNSS sont également modulés à l’aide du message de navigation. Le message de navigation contient des informations qui sont exploitées par le récepteur, citons entre autres :
- La position des satellites (éphémérides) et des informations le concernant (état du satellite).
- Les éléments permettant l’obtention de la date de l’émission du signal, dans l’échelle du temps du satellite.
- La correction d’horloge satellite à appliquer pour s’affranchir de sa dérive par rapport au temps du GNSS.
- Des informations plus générales : modèle paramétrique global de l’ionosphère (pour la correction de son effet), almanach de tous les satellites (santé, position approchée).
Définition RTK (Wikipedia)
La Cinématique temps réel (Real Time Kinematic, en anglais ou RTK) est une technique de positionnement par satellite basée sur l’utilisation de mesures de la phase des ondes porteuses des signaux émis par les systèmes GPS, GLONASS ou Galileo.
Une station de référence fournit des corrections en temps réel permettant d’atteindre une précision de l’ordre du centimètre. Dans le cas particulier du GPS, le système est alors appelé Carrier-Phase Enhancement ou CPGPS.
- Traitement différentiel de la phase des signaux GNSS
- Précision centimétrique inversement proportionnel à la « ligne de base » du fait de la décorrélation spatiale des sources d’erreurs et notamment des erreurs atmosphériques.
- Recevoir la position approchée de l’utilisateur (NME-GGA) connecté par TCP/IP (GPRS, EDGE, UMTS(3G) voir xDSL ou Internet par satellite)
- Modéliser en temps réel les erreurs affectant le chantier de l’utilisateur et lui renvoyer des « corrections » spécialement générées pour sa zone de travail (concept réseau MAC, VRS, FKP)
- Diffuser les corrections de manière fiable et transparente en s’appuyant sur les réseau Télécoms existants
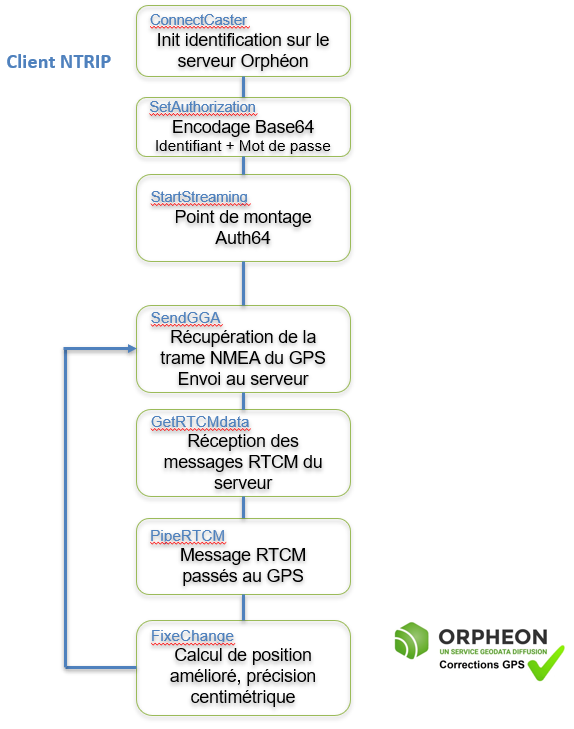
Le Client NTRIP
Le protocole NTRIP (Network Transport of RTCM data over IP) permet d’envoyer les données de correction RTK de la base vers le mobile via Internet.
Ceci est particulièrement utile dans les zones où les radios traditionnelles ne fonctionnent pas bien en raison des arbres ou des collines.
Le client NTRIP est une partie du logiciel intégrée au mobile. Il obtient les données de correction du serveur NTRIP Orphéon et les envoie vers en interne dans le GPS au module de calcul du positionnement. Ce programme est une alternative plus utile à la radio Internet GNSS.
L’accès à Internet se fait généralement via les moyens classiques :
- Une connexion Wifi
- Une connexion Bluetooth
- Une connexion de téléphonie mobile
Tant que le GPS n’est pas connecté et ne reçoit pas les messages de corrections RTCM du serveur Orphéon, le GPS fonctionne comme un GPS ordinaire avec une précision de plusieurs mètres (mode naturel).
Pour ce connecter au serveur NTRIP Orphéon, le Client NTRIP du mobile doit être paramétré pour s’identifier auprès du serveur et obtenir les corrections au format adapté à son mode de calcul.
- Adresse IP du serveur (ou DNS)
- Le port de communication
- L’identifiant de l’utilisateur
- Le mot de passe de l’utilisateur
- Le point de montage correspondant au mode de calculs
Au moment de la connexion, le Client NTRIP va s’identifier puis il va envoyer au serveur sa position actuelle (trame $GxGGA) afin que le serveur puisse définir les stations de référence qui seront utilisées dans la solution de correction (mode réseau) ou la station de référence la plus proche (mode mono station).
Le serveur va alors envoyer toutes les secondes le message de correction au format RTCM sélectionné par le point de montage.
Le GPS va intégrer ces paramètres de correction à ses calculs pour améliorer sa précision qui en quelques cycles va atteindre la précision recherchée. Le temps mis à obtenir cette précision est le temps de convergence.
Le GPS va également envoyer régulièrement au serveur sa position afin :
- de recevoir les meilleurs paramètres de correction (notamment si le GPS se déplace dans un véhicule).
- de permettre au serveur de déterminer que le mobile se trouve toujours dans la zone de travail couverte par le service.
- de permettre au serveur de confirmer que la connexion avec le mobile est toujours valide.
Les étapes
Sans entrer dans le détail de ces programmes, il est intéressant de comprendre ce qui se passe à chacune de ces étapes.
Formats des messages de correction
Le format et le contenu des messages de corrections GPS sont édictés par la norme de l’organisme RTCM. Chaque message RTCM est constitué d’un nombre variable de mots de 30 bits, dont les deux premiers servent d’en-tête. Dans le cadre de la localisation temps réel, les messages 18 et 19 sont d’un intérêt majeur, et la quantité minimale d’information à diffuser pour une correction RTK est donnée par la formule :
(1) [octets/s] = [mots de 30 bits] x 5 = f x2 xFREQ x(3 + 2x N) x51
Où f désigne la cadence de mesures ; FREQ, valant 1 ou 2, décrit le caractère mono ou bifréquence du récepteur ; N représente le nombre de satellites.La version officielle de la norme à l’heure actuelle s’appelle :
RTCM 10403.3, Differential GNSS (Global Navigation Satellite Systems) Services – Version 3 + Amendement 1 (28 avril 2020).Voir la liste complète des messages RTCM et leur utilisation : https://www.use-snip.com/kb/knowledge-base/rtcm-3-message-list/
la version 3 regroupe les messages avec des données associées au lieu d’envoyer des messages séparés pour accomplir la même tâche. Par exemple, dans la version 2, l’envoi d’un message RTK complet nécessitait un message de type 18 pour les corrections et 19 pour les mesures de pseudo-distance, alors que dans la version 3 ces informations sont regroupées dans un seul type 1003. Plusieurs types de messages sont définis pour les mêmes types de des informations pour améliorer encore l’efficacité ; Le type 1001 a des données GPS uniquement sur la fréquence L1, tandis que 1002 ajoute diverses informations supplémentaires, tandis que 1003 et 1004 font de même avec les données L1 et L2 pour les stations qui peuvent tirer parti de la deuxième porteuse.
la version 3.x utilise un format de message de longueur variable et un seul contrôle de redondance cyclique (CRC) de 24 bits sur l’ensemble du message, par opposition à une parité de 6 bits pour chaque mot de 30 bits. Comme les versions précédentes, le format de message commence par un préambule étendu à 8 bits, suivi d’une zone réservée de 6 bits, puis d’une longueur de message de 10 bits qui autorise jusqu’à 1 024 octets de données. Le message, chacun avec son en-tête et ses données définis de manière privée, suit l’en-tête et est ensuite limité par le CRC. L’économie de données, notamment dans le cas du RTK, est importante, un jeu de correction RTK version 3 est généralement deux fois moins long que la version 2.
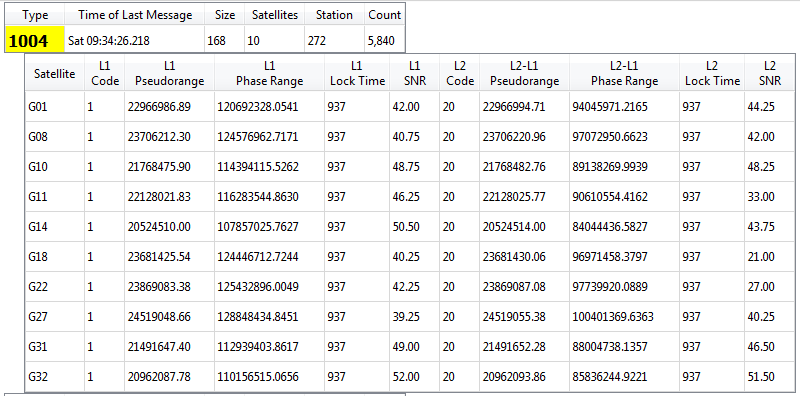
Exemple : RTCM 1004 : Observables RTK GPS L1 et L2 étendus
Ce type de message GPS est le type de message d’observation le plus courant, avec un contenu L1/L2/SNR. Il s’agit du message hérité le plus fréquemment trouvé.
Le point de montage
Le point de montage permet de choisir le type de flux de données et la liste des messages RTCM qui vont être échangés entre votre matériel et notre serveur, cela correspond à la fois au langage que le matériel va utiliser mais aussi à la méthode de calcul du positionnement qui va être utilisé.
Corrections i-MAX, MAX, MAC, FKP, VRS ?
Dans le paramétrage de votre équipement qui va orienter votre choix de point de montage le choix du type de corrections va dépendre de votre matériel, des mesures que vous allez effectuer et des disponibilités de services.
MAC
A l’initiative de Leica Geosystems et de GEO++ en 2001, première norme NRTK pour la correction de messages réseau qui permettraient de surmonter les problèmes des différentes approches existantes. Concept basé sur la notion de maître et de mobile (Master Auxilary Concept) permettant au Mobile de recevoir les données brutes d’observations de la station Maître la plus proche afin d’effectuer ses calculs de corrections.
MAX
Ce format Leica Geosystems, est basé sur le principe d’utilisation d’une cellule de plusieurs stations de référence autour du mobile avec une station de référence (la plus proche). les corrections MAX contiennent toutes les informations de corrections de la cellule et fournissent un niveau maximal de précision et de fiabilité pour le mobile.
Ces corrections optimisent la bande passante nécessaire pour transmettre les corrections.
FKP
La méthode FKP, (Flächen-Korrektur-Parameter) la plus ancienne développée par Geo++, consiste dans le principe de transmissions d’un modèle d’erreurs calculées pour le lieu ou se trouve spécifiquement le mobile. Par la suite, le mobile calcule lui-même les corrections de la même manière qu’en VRS. En plus la correction d’une station de référence physique est utilisée en combinaison avec les FKP pour calculer les corrections individualisée pour la position du mobile.
Les corrections FKP sont transmises dans le format RTCM 2.3. Cette méthode qui fournit au mobile plus d’informations est gourmande en bande passante et demande une qualité de communication stable sans pour autant être compatible full GNSS.
i-MAX
Introduit par Leica Geosystems les corrections réseau RTK sont basées sur la position du mobile sont calculées à partir des informations relatives à une station maître virtuelle créée par calculs à proximité directe du mobile afin de réduire la longueur de la ligne de base et présenter un niveau d’erreur plus faible. La position de la station maître peut changer pour suivre les déplacements du mobile.
Corrections compatibles Full GNSS transmises au format RTCM-3 MSM
VRS
Avec la Station de Référence Virtuelle , concept introduit par Trimble, le récepteur mobile interprète et utilise les données de correction-réseau d’une base virtuelle comme s’il fonctionnait avec une seule station de base physique sur une très courte ligne de base, ce qui augmente considérablement la performance RTK. Il ne crée toutefois pas de vecteur virtuel.
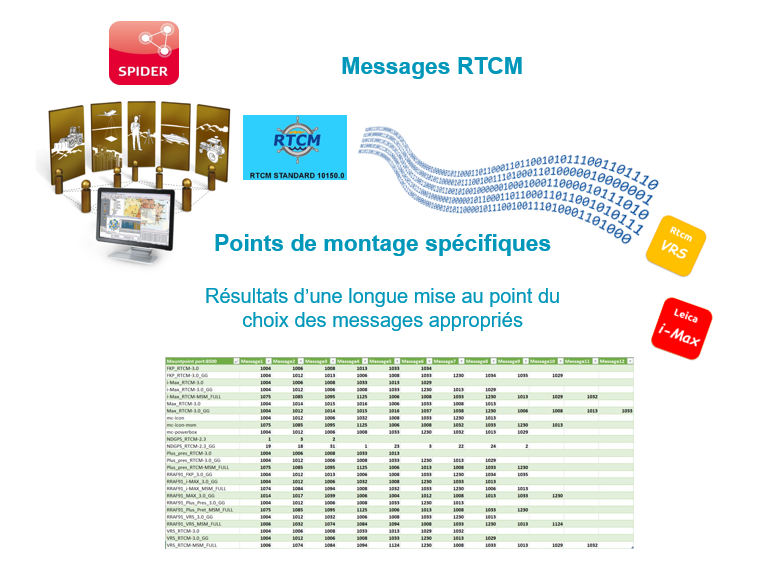
Les différents formats RTCM de transmission des corrections
Chaque point de montage est le résultat de l’assemblage des messages RTCM complexe. Cet assemblage doit faire l’objet d’une étude et d’une mise au point spécifique dans le choix de ces messages pour une bonne optimisation. Cette mise au point est importante car elle fait toute la différence entre des corrections RTK génériques et des corrections RTK optimisées.
A quoi bon investir dans un GPS de précision de grande qualité pour ensuite utiliser des corrections génériques minimalistes ou peu adaptées ?
Chez Orphéon, le choix des messages RTCM à fait l’objet d’une mise au point longue et attentive par des experts en géodésie qualifiés afin que vous puissiez tirer le meilleur positionnement en toutes circonstances de votre matériel.
A ce niveau, tous les réseaux fournissant des corrections RTK ne se valent pas.
Format RTCM-2.x (DGPS)
Ce message est le moyen le plus courant d’envoyer des corrections de code de style DGPS pour GPS ou FKP
Format RTCM-3.1 ( RTK GPS Glonass)
Les versions 3.0 et 3.1 de RTCM se concentrent sur l’optimisation de l’utilisation de la bande passante, sur une intégrité supérieure et sur la gestion des réseaux RTK
Format RTCM-3.x MSM (RTK Full GNSS)
La norme RTCM-3 MSM assure ainsi l’interopérabilité des données avec tous les récepteurs GNSS compatibles en transmettant les observations normalisées des signaux GPS + Glonass + Galileo + Beidou pour l’ensemble des fréquences L1/L2 et L5.
Les formats des messages étaient auparavant limités aux bandes L1 et L2 et à un seul signal par bande, c’est pourquoi il est devenu nécessaire d’utiliser un nouveau format de données universel en temps réel : le MSM (pour Multiple Signal Message) qui est le nouveau concept de clé RTCM-3 permettant de présenter toutes les données d’observations GNSS sous forme générique.
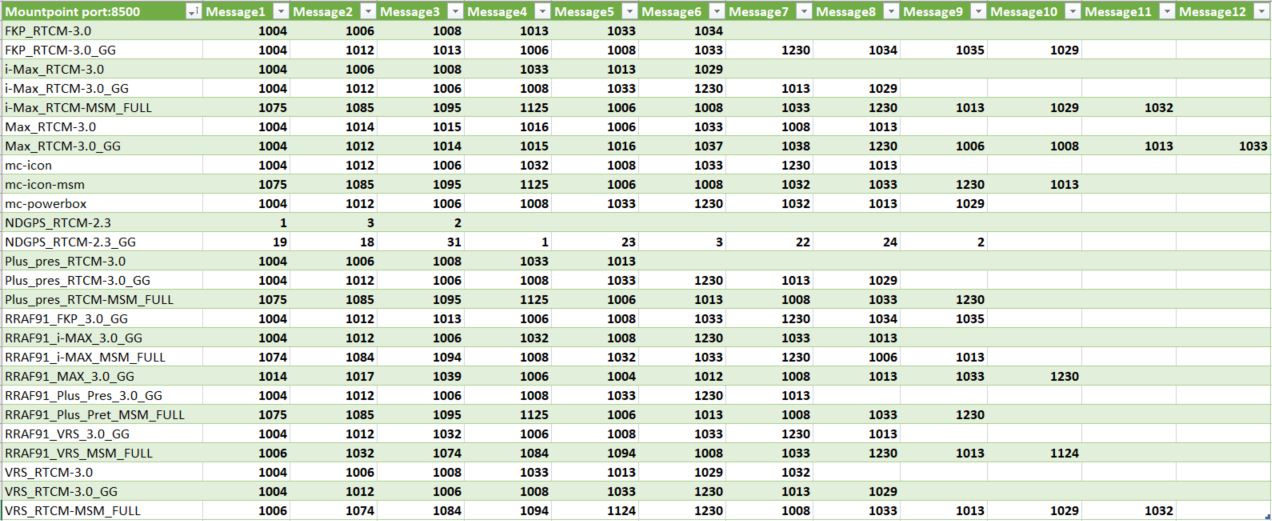
Liste des messages RTCM utilisés
Voici la liste des messages RTCM utilisés pour chaque point de montage pour le port 8500 (toutes applications sauf agriculture. Pour agriculture voir liste des messages RTCM du port 7500).