![]()
RTK GPS Developer, Integrator or Tester Guide
Need for precision
Centimeter precision becomes essential or even vital when you want to guide the movement of a robot, a drone allowing them to avoid obstacles or when you need to know in detail a trajectory, an exact position at a precise moment.
But many applications require precise positioning among them:
-
-
-
- Guidance solution (Robot, vehicles, drones, tractors, mowers, etc.)
- Geolocation of valuables (containers, loading)
- Timing for racing or training (cars, horses, etc.)
- The experimental study of moving objects (Evaluation of repetition or deformation)
-
-
R&D firms are in great demand to develop them very quickly.
Objective
Our goal here is to provide you with basic information that will allow you to quickly understand the operation and principle of RTK corrections, but also to save time on the various integration stages of your project.

The Orphéon network with the pioneers
For 15 years, Orphéon has offered centimetric precision positioning thanks to real-time RTK corrections, which are the heart of our activity and for which we have developed unparalleled expertise. We provide this type of corrections to all kinds of so-called “traditional” applications: for surveying, cadastre, agriculture, machine control, bathymetry, cartography or GIS, but we also provide these corrections to applications of tomorrow.
What are the elements
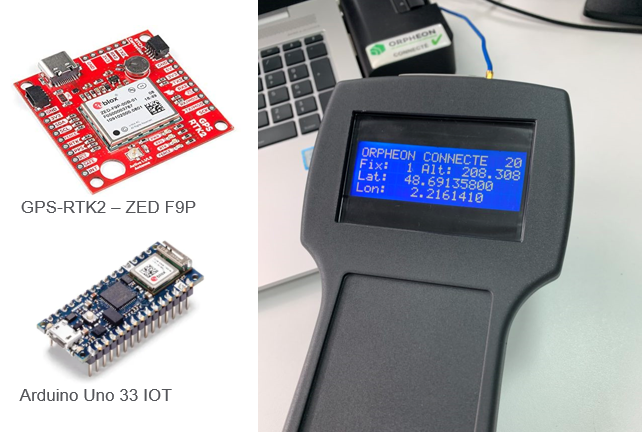
First, you must have a GPS-RTK module. Either a GPS chip or a much more practical development board for your first tests. The advantage of the development board is to offer a module already wired on a printed circuit and which has all the very useful connectors.
There are several types of development boards Ublox, Quectel etc. who are able to work in Full GNSS (GPS, Glonass, Galileo and Beidou) but who also have the ability to receive RTCM messages (corrections provided by the Orpheon server) for their calculations and thus improve their positioning.
The GPS receiver must be connected to a receiving antenna. The characteristics and the quality of the antenna will of course condition the quality of reception of the satellite signals that the GPS module will be able to process. Note that the signals from the different constellations of satellites are not the same, the antenna must therefore be able to pick up each of these frequencies.
Generally, it is possible to connect these cards via a USB port to your PC then to launch the manufacturer’s application to access the settings but also often to connect to the Orpheon server (via the internet connection and an NTRIP client integrated into the application) to test the correction and obtain centimeter precision in a few moments.
But then, what is interesting is to make this system a little more autonomous to be able to use it at the heart of a more complex project. All you have to do is connect this development board to a controller (Arduino, Rasberry etc.).
Ease of integration
It is interesting to see that the integration of a GPS module is greatly facilitated by the open source codes available on the net and very widely commented. Development boards can be driven via a serial port or I2C.
We will therefore not go into the details of this program.
Steps
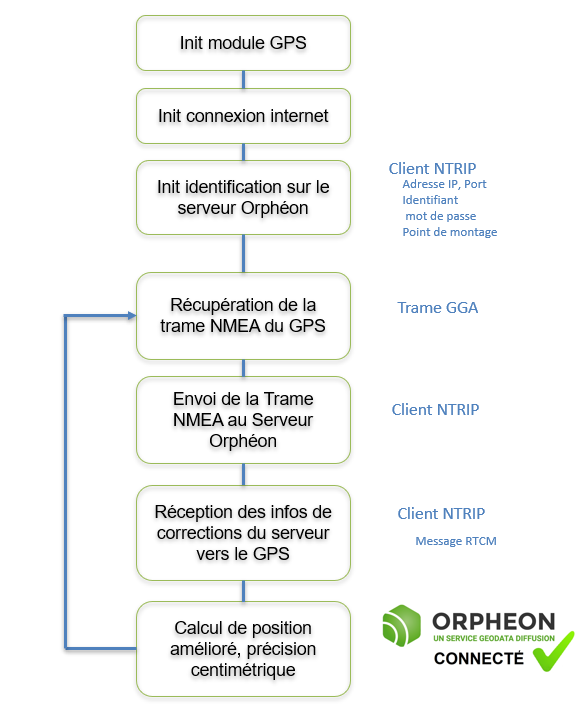
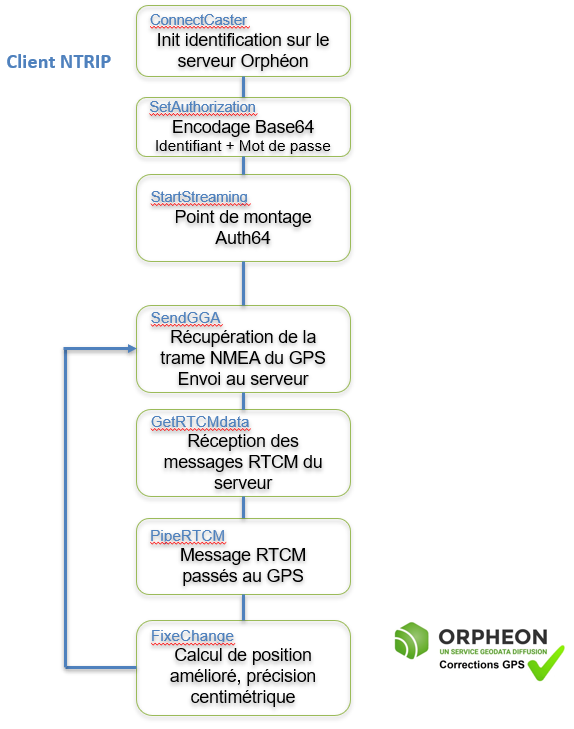
Whatever your hardware, the connection steps have been standardized and defined to allow everyone to access centimeter precision.
In detail
At the time of connection, the Ntrip client identifies itself on the server and sends its initial position (GGA type NMEA frame)..
It uses connection settings:
- Server DNS address
- Server com port
- User ID
- Password
- Mount point (allows you to define the com protocol and RTCM messages sent by the server)
it is interesting to understand what happens at each of these stages.
The server will then send the correction parameters every second that the module must “pass” to the GPS for its positioning calculations.
During its initialization phase, the GPS will resolve the entire ambiguities. The duration of this phase is variable and depends on the algorithm, the distance from the pivot, but also the number of observations (number of satellites, number of frequencies).
The GPS will then modify the indication of its state depending on the resolution of the ambiguities:
RTK Floating (2): The ambiguity is allowed to be a decimal or floating point number. Decimetric precision.
RTK Fixed (4): the number of wavelengths is an integer. The precision is centimeter.
A low number of visible satellites, poor geometry of the satellite constellation and a correction reception link with the rover can prevent a fixed solution.
Then the module must send its position to the server (at least every 20 seconds) to allow the server to evolve the correction solution and to ensure that the connection is still “alive”.
Connection to the Orpheon server via an NTRIP Client app
Once the GPS module is connected via the USB port to a PC, there are several possibilities to connect to the Orpheon server to receive the corrections necessary to increase the precision of a GPS-RTK.
As long as the GPS is not connected and does not receive RTCM correction messages from the Orpheon server, the GPS works like an ordinary GPS with an accuracy of several meters (natural mode).
Apps
The applications presented here are given by way of example because they are free, supplied by a manufacturer or available on the internet as open source.
-
-
- RTKLIB
- u-center Ublox
- GNSS Internet Radio
- NTRIPClient Lefebure
-
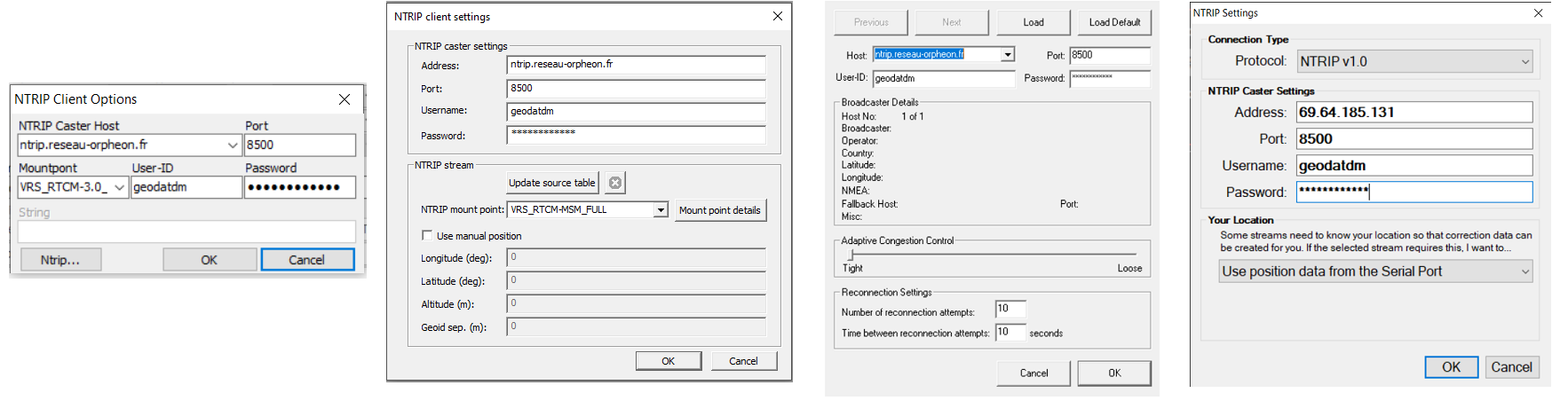
Examples of different applications with NTRIP Client
Settings
Each of these applications is configured in the same way, you must enter*:
-
-
- Orpheon server address: ntrip.reseau-orpheon.fr
- Port: 8500
- The mount point: VRS_RTCM-MSM_FULL
- Identifier: geodatdm
- The password : *******
-
* These parameters are given as an example, please refer to the delivery note sent by our team and corresponding specifically to your subscription.
The precision
When these applications are launched, they follow the steps described above one by one and in a few seconds the position obtained gains in precision to reach centimeter precision:
Positioning accuracy with Orpheon is centimeter for a standard deviation of 1σ:
-
-
-
- between 1 and 2 centimeters in planimetry (Lambert 93).,
- between 2 and 3 cm in altimetry (IGN69).
-
-
Connection to the Orpheon server via your controller card
It is also possible to make this system a little more autonomous to have it at the heart of a more complex project. Then just connect your GPS-RTK development board to a controller (Arduino, Rasberry etc.).
To do this, you will have to program this controller so that it can automatically perform the various steps necessary to connect to the Orpheon server and thus benefit from precision corrections.
This programming amounts to integrating the NTRIP Client on the controller card. On the Net there are multiple examples in open source commented.
Sending a GGA-type NMEA frame
When connecting, it is important to send an NMEA type GPGGA frame with the position of the mobile GPS. This position will allow the server to define a cell of several network observation stations around the user and thus be able to provide the corrections corresponding to the position.
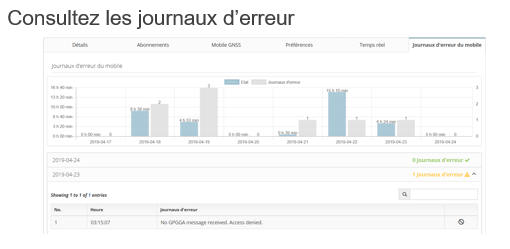
Caution: If no frame is sent to the server, the error message No GPGGA message received. Access denied is added to the error log (see Customer area).
Similarly, if the position sent is zero (all zero) the message Currently no data available. No sites and/or clusters defined. is added to the error log (see Customer Area).
Coverage area
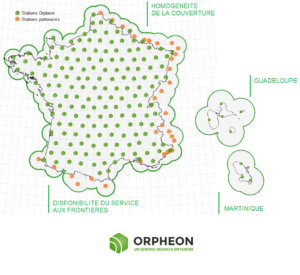
The position of the mobile GPS sent to the server must imperatively be located in the network coverage area but also in the restricted area stipulated when subscribing to the service.
Outside the coverage area of the Orpheon network, the server is not able to provide the corresponding corrections. Our coverage area is defined by the position of our permanent observing stations.
Pay attention to the geographical restriction of your subscription, the server will terminate the connection and add an error message in the connection log (see Customer Area)
If the mobile GPS returns a position outside the subscription zone
- National : aucune restriction
- Régional : la région administrative stipulée lors de l’abonnement (ou 4 départements contigus)
- Départemental : le département administratif stipulé lors de l’abonnement
Maintaining connection with the server
Attention: To maintain the active connection between the GPS receiver and the Ntrip server which sends the corrections, a GGA frame (if possible updated with the real position of the GPS) must be sent regularly to the server. This measurement helps ensure that the link is truly up. If after 30 seconds no GGA frame is sent to the server, the latter considers that the link is interrupted and terminates the connection.
In the error log (see Customer area) a new information message indicates: Rover user rejected. No heartbeat received.
Steps
Without going into the details of these programs, it is interesting to understand what happens at each of these stages.
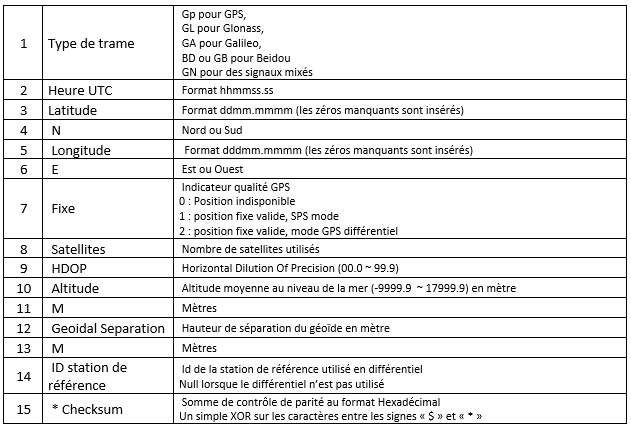
Content of the NMEA GGA frame
There are a large number of different NMEA frames (over thirty). These frames are defined by the NMEA 0183 standard which is a specification for communication between marine equipment, including GPS.
This standard uses frames or sentences to transmit information, each information is separated by a comma.
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| $GNGGA, | 073939.00, | 4841.47953, | N | 00212.97078, | E, | 1, | 24, | 0.62, | 165.7, | M, | 46.2, | M | , , | *42 |
The frame begins with the sign “$” then the type of epic is defined by the two characters that follow.
Each frame has its own syntax, but depending on the case, they must end, after the “*” sign, with control bits which make it possible to verify that the frame has not been damaged before its reception.
The NTRIP server needs the information contained in the GGA frame because this frame provides the current position of the GPS receiver.
NMEA frames all refer to the WGS84 ellipsoid as the base coordinate system.
Customer area information

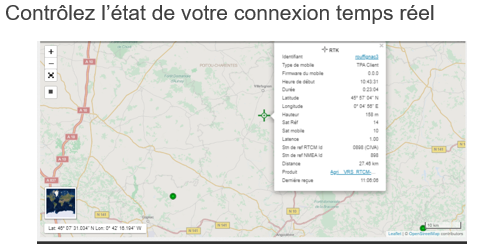
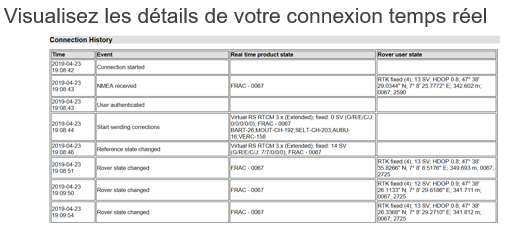
The Orphéon network offers, thanks to its user interface, tools that facilitate your daily work or the development and integration of precision GPS chips in your projects. Check your connections in real time, consult logs or view your trajectories makes your work easier and saves time. but also post-process your work directly online.
Your Tools
-
-
- Visualization of your real-time connections
- Check your connection and settings
- Analyze your connections (logbook)
- Visualize your trajectories
- Perform online post-processing
- Change of reference system online
- Download Rinex from Orpheon stations
-

See Also