Share the post "Sparkfun ZED-F9P circuit test with the Orpheon network"
Democratization of technology
Today the integration of precision GNSS chips is democratizing by becoming affordable and makes it easy to imagine all kinds of practical uses. It then becomes possible to integrate an RTK receiver with centimetric precision in a compact, light and energy-efficient design to meet the requirements of these new applications and thus free the imagination and creativity.
Objective of this test
Our goal here is not to promote one product over another, but just to use a module that will simplify our access to a centimeter position given the little time we can devote to this exercise. Our objective is quite minimalist since we just want to be able to connect to the Orpheon network server and obtain the corrections to display a position whose precision has been increased thanks to the network corrections.Warnings
This test makes it possible to illustrate the stages of integration in an attempt to popularize the main lines of the content. There is no question here of worrying about performance or precision (maybe we will do that later). There is also no question of providing a turnkey solution or software or part of a program.
There are several evaluation kits on the market:
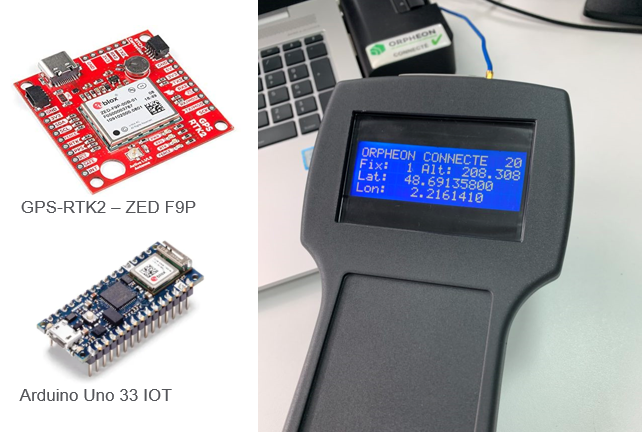
On our side we tested the Sparkfun ZED-F9P circuit because the implementation is quite simple. Ordered more than a year ago, we cannot tell you today how soon or at what price this devaluation kit is now available. To do the very first tests very quickly, it is possible to connect a PC via its USB-C port (which will power the card) and a GPS antenna, for our part we have opted for an AS10 Leica antenna available on our shelves .
- Concurrent reception of GPS, GLONASS, Galileo and BeiDou
- Receives both L1C/A and L2C bands
- Voltage: 5V or 3.3V but all logic is 3.3V
- Current: 68mA – 130mA (varies with constellations and tracking state)
- Time to First Fix: 25s (cold), 2s (hot)
- Max Navigation Rate:
- PVT (basic location over UBX binary protocol) – 25Hz
- RTK – 20Hz
- Raw – 25Hz
- Horizontal Position Accuracy:
- 2.5m without RTK
- 0.010m with RTK
- Max Altitude: 50km (31 miles)
- Max Velocity: 500m/s (1118mph)
- Weight: 6.8g
- Dimensions: 43.5mm x 43.2mm (1.71in x 1.7in)
- 2x Qwiic Connectors
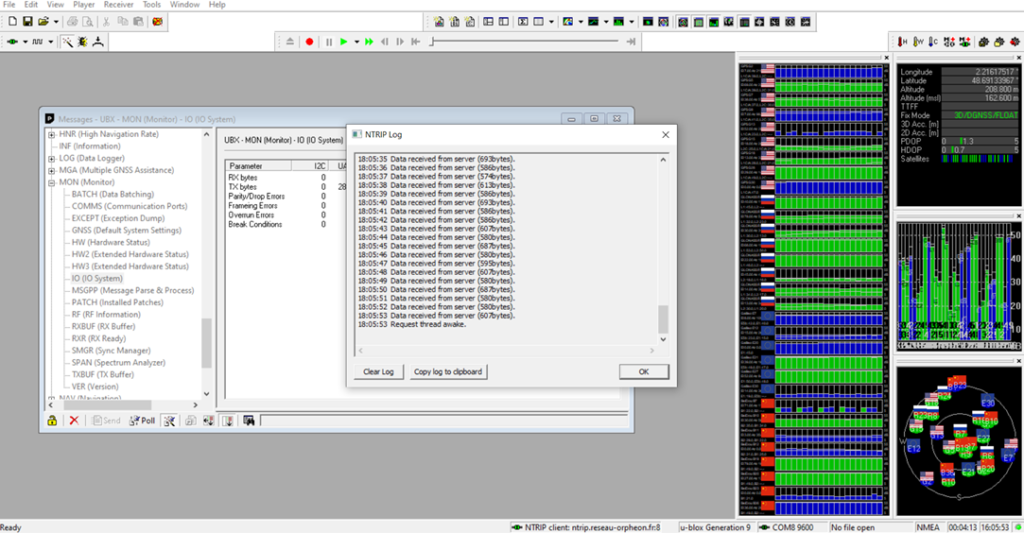
With the Ublox U-center application, it is very easy to view the available satellites. It still takes a bit of time and patience to become familiar with the app. Once the NTRIP Client Orpheon parameters have been entered, the GPS converges and fixes fast enough to obtain a centimetric positioning.
Connection to the Arduino board
Then, what is interesting is to make this system a little more autonomous to be able to use it at the heart of a more complex project. Then just connect this development board to the Arduino Uno 33 IOT controller. The role of the controller board will be to act as a gateway between the GPS (ublox) and the corrections server. We opted for the I2C port to be able to possibly have the other Com ports for other services (maybe not the simplest nor the most judicious … but it works)Ease of integration
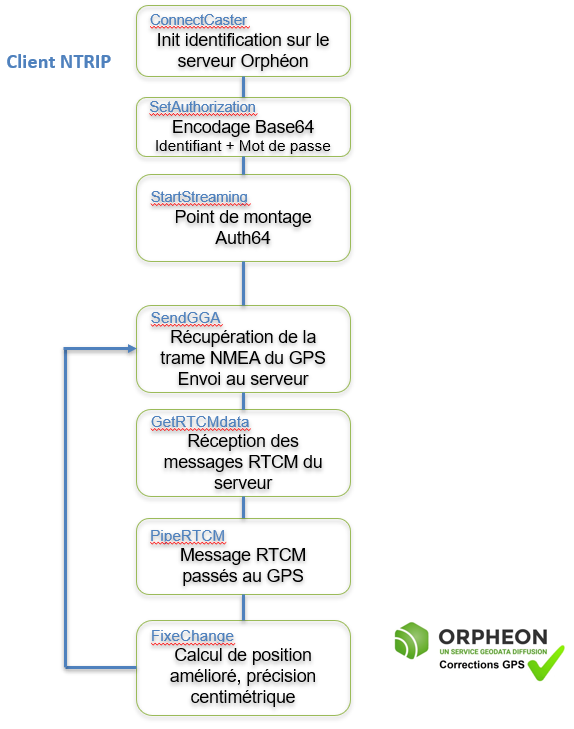
It is interesting to see that the integration of an RTK GPS module is greatly facilitated by the open source codes available on the net and very widely commented. Development boards can be driven via a serial port or I2C. It will be necessary to integrate into this Arduino RTK GPS a “Ntrip client” which is a small software module (available in open source on the internet). Whatever your hardware, the steps for connecting to an RTK server have been standardized and defined to allow everyone access to centimeter precision.General operation
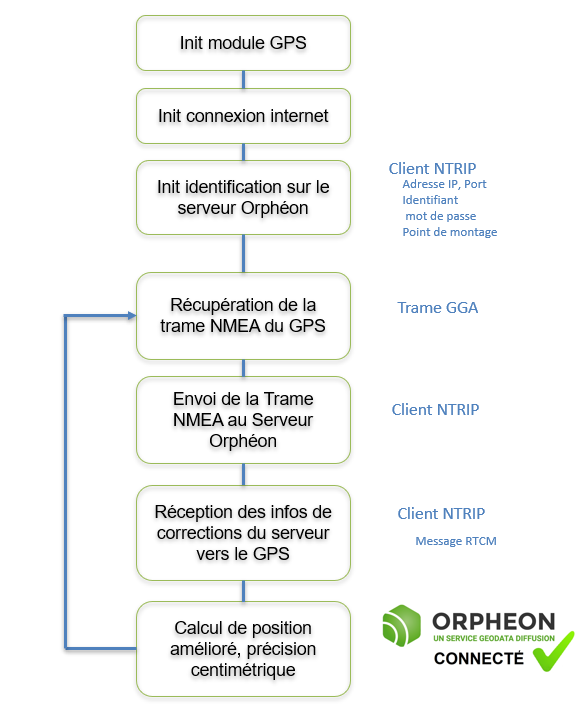
In detail
At the time of connection, the Ntrip client identifies itself on the server and sends its initial position (NMEA frame type GGA). It uses the connection parameters:- Server DNS address
- Server com port
- User ID
- Password
- Mount point (allows you to define the com protocol and the RTCM messages sent by the server)
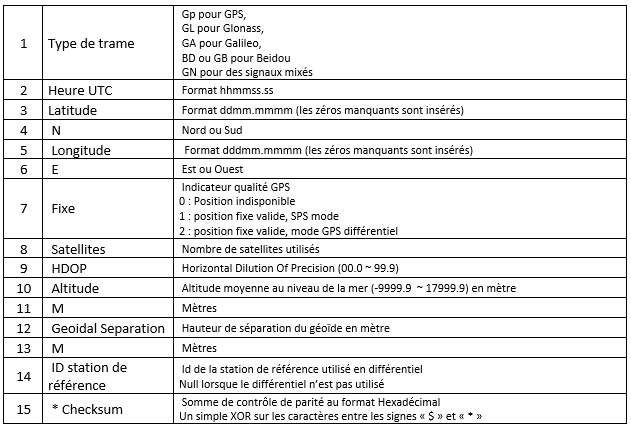
Content of the NMEA GGA frame
There are a large number of different NMEA frames (over thirty). These frames are defined by the NMEA 0183 standard which is a specification for communication between marine equipment, including GPS. This standard uses frames or sentences to transmit information, each information is separated by a comma.| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| $GNGGA, | 073939.00, | 4841.47953, | N | 00212.97078, | E, | 1, | 24, | 0.62, | 165.7, | M, | 46.2, | M | , , | *42 |